¶ Что это, и зачем оно нужно?
Klicky probe (Euclid Probe/Quickdraw Probe) представляет собой механический концевик, присоединяемый к печатающей голове на время парковки или снятия карты высот.
Является альтернативой микропробе в случае некорректной работы стоковых пьезодатчиков или необходимости использования иных покрытий стола.
Вдохновлено данной модификацией принтера Vostok: https://forum.k3d.tech/t/klicky-probe-dlya-printera-vostok
|
 |
 |
 |
¶ Дисклеймер
Статья не является призывом к действию. Данная модификация предложена как один из вариантов решения проблемы. Если в стоке все нормально работает, никакую проблему решать не надо, печатай в стоке.
Не рекомендуется для новичков. Могут возникнуть сложности с конфигурацией. Любое неосознанное внесение изменений в конфиг может привести к некорректной работе или повреждению принтера. Все действия осуществляются на свой страх и риск.
¶ Особенности реализации
- снятие и установка датчика осуществляются с помощью сервопривода.
- предусмотрена проверка наличия датчика на голове. Если он уже установлен, процедура установки пропускается. При снятии аналогично. В случае, если после установки датчика на голове по-прежнему нет, происходит аварийная остановка с выводом сообщения об ошибке. При снятии аналогично.
- при стандартной парковке (G28) ось Z паркуется об дно принтера по sensorless homing с целью выравнивания рамы стола.
Благодаря этому положение рамы стола не сбивается со временем, как при стоковом варианте, и позволяет не держать моторы оси Z включенными. Кроме того, выравнивание стола по винтам не влияет на положение рамы, как при Z_TILT_ADJUST.
Минусом является то, что на положение рамы влияет пластиковый мусор на дне принтера, но это решается либо содержанием его в чистоте, либо уборкой перед ответственной печатью.
- координаты по оси Z при стандартной парковке весьма приблизительные, и не подходят для печати или иных операций, где нужна точность по этой оси. Для этого после парковки обязательна коррекция по датчику автоуровня с помощью PROBE или BED_MESH_CALIBRATE.
- переопределены макросы PROBE, BED_MESH_CALIBRATE, SCREW_TILT_ADJUST. Добавлена коррекция координаты Z по датчику автоуровня с предварительной проверкой припаркованности осей и парковкой при необходимости.
- адаптивная карта высот реализована на базе стокового функционала клиппера v13. Для включения необходимо использовать BED_MESH_CALIBRATE ADAPTIVE=1 в стартовом гкоде.
- конфиг актуален для моей рабочей конфигурации: ОС OpenQ1, клиппер v13, вебинтерфейс Mainsail, экран Klipperscreen на андроид смартфоне.
Под стоковую систему его следует адаптировать. У опытных проблем возникнуть не должно, а на новичков это и не рассчитано. Сам же я заниматься скорее всего не буду, потому что нужно обратно ставить сток и вникать в работу стоковых макросов для экрана.
Под Freedi должен подойти без проблем, но это не точно. Скорее всего, надо будет внести какие-то изменения для корректной работы сток дисплея.
¶ Требуемые компоненты
- кит PCB klicky
Подробнее https://github.com/tanaes/whopping_Voron_mods/tree/main/pcb_klicky

- сервопривод, лучше MG90S с металлическими шестернями (бывает паль). Можно и обычные синие, но у меня сломались, возможно я просто рукожоп
- винт М3х16
¶ Ссылки
Архив с файлами: Klicky Probe
¶ Сборка
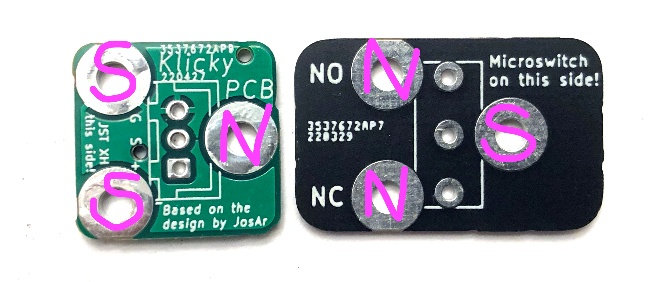
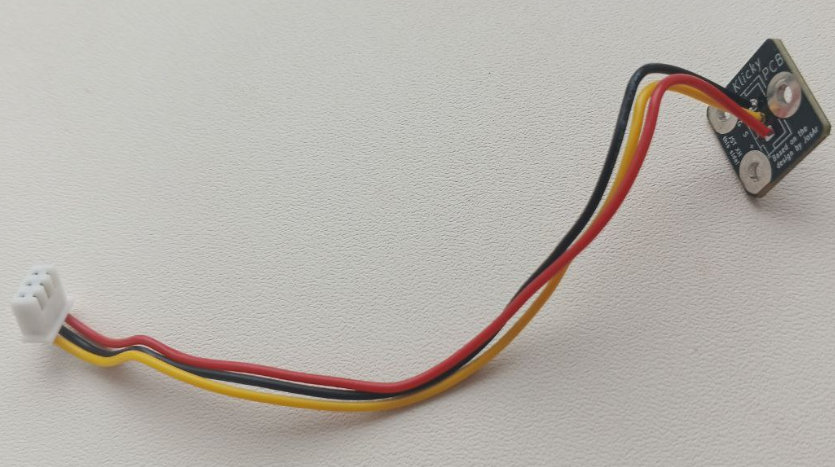
Датчик автоуровня собирается с помощью винтов и магнитов, идущих в наборе. В комплекте идут вплавляемые втулки, можно вплавить, но я собирал без них, просто в пластик. Главное полярность магнитов соблюдать.
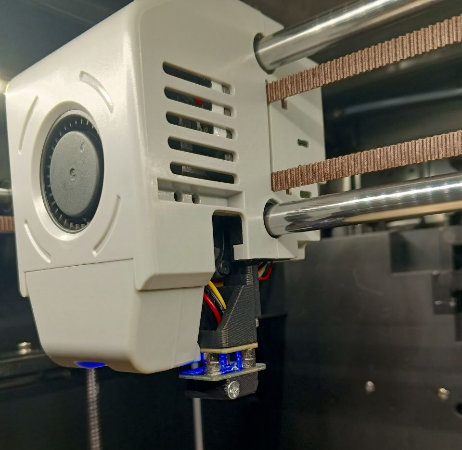
Крепление датчика к голове прикручивается на те же винты, что и стоковый.
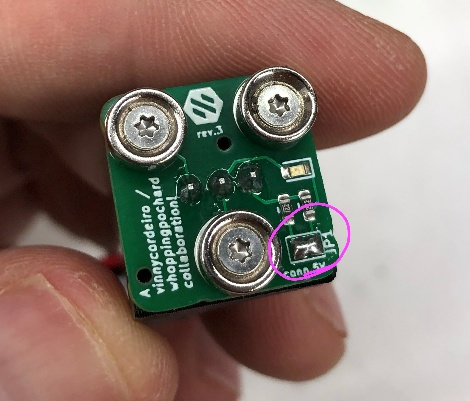
На стационарной плате следует запаять перемычку
Подключение осуществляется в порт индуктивной пробы на голове. Идущий в комплекте штекер как раз подходит. Я его оставил для подключения к плате головы и припаял провода к датчику напрямую, выпаяв разьем.
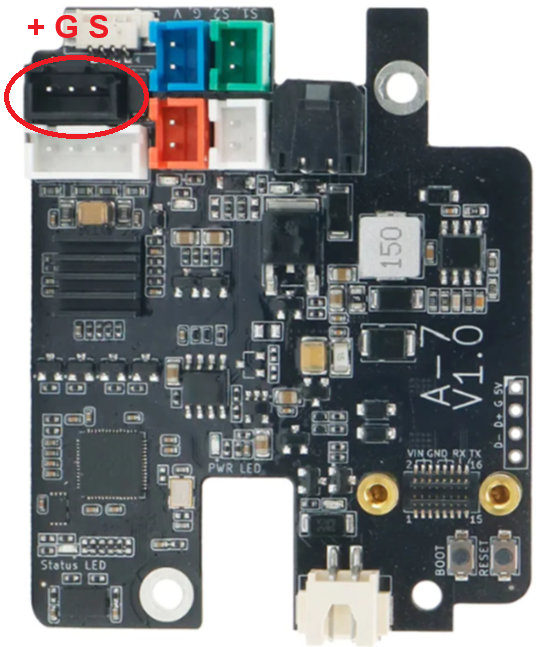
Подключение возможно двумя вариантами: Если подключить все 3 провода, то существует вероятность, что какой-нибудь железный предмет случайно примагнитится к свободным магнитам на голове, когда датчик не присоединен, и вызовет КЗ. Если не подключать + 5V, то работать будет точно так же, но не будет гореть светодиод на пробе, зато исключена вероятность КЗ.
После подключения желательно проверить его работоспособность через вебинтерфейс!
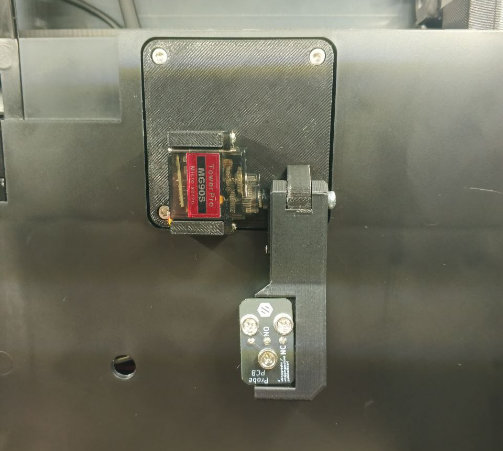
База устанавливается на место штатного вентилятора на задней стенке на его винты. Сам вентилятор потребуется перенести в отсек электроники, например, на выдув, сконфигурировав его как controller_fan. Правый нижний винт в базу следует вставить до установки серворуки. Закручивать в поднятом положении. К серворуке в углубление прикручивается комплектный магнит. Качалка прикручивается к руке на тот же винт, что и магниты. Прикручивать качалку к серве не надо.
Окончательную сборку лучше осуществлять после установки конфига и подключения сервы.
Она подключается в порт тензодатчиков вот так:
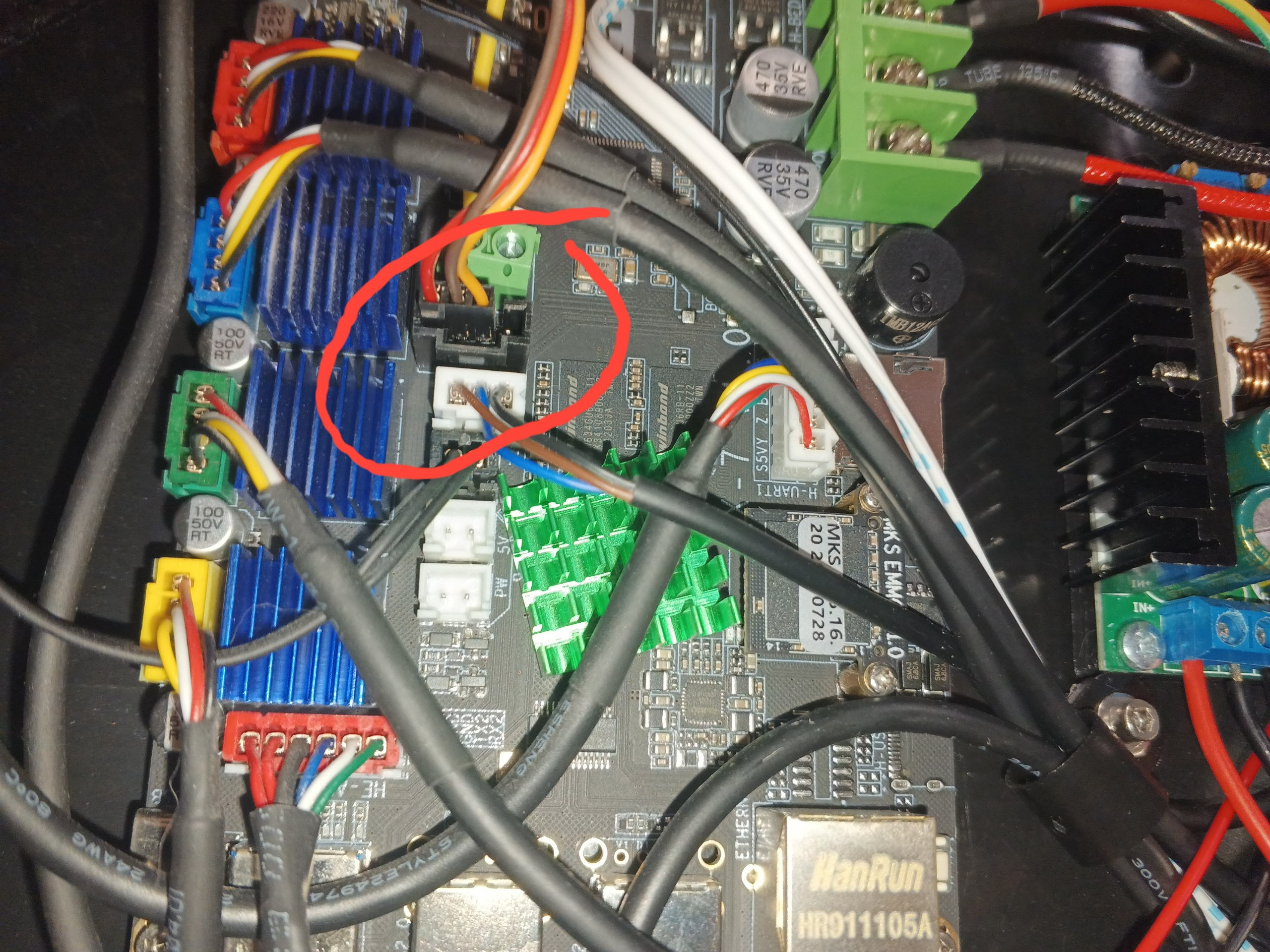
Потребуется поменять местами красный и коричневый провода в разьеме сервы.
При запуске принтера серва сразу встанет в нижнее положение. Следует присоединить руку к серве так, чтобы она была в нижнем положении, после чего серву вместе с рукой вставить в штатное место на базе. Таким образом, серва будет установлена в своем рабочем диапазоне.
Серва прикручивается к базе на 2 комплектных винта с широкими шляпками. Рука прикручивается на винт М3х16 в подвижном соединении. После этого можно прикрутить базу на место штатного вентилятора, вставив провода сервы в предусмотренный паз.
¶ Калибровка
Теперь можно приступить к настройке конфигурации. Все настройки, связанные с клики пробой, находятся в файле macros.cfg в самом верху.
Первым делом следует подкорректировать верхнее положение серворуки. Для этого нужно выставить ее в верхнее положение командой SET_SERVO SERVO=probe_dock ANGLE=16, прицепить датчик в голове, и руками перемещая голову подобрать такое значение угла, чтобы датчик свободно заходил на док-станцию, и ничего не задевал. Нижнее положение настроить на свое усмотрение, главное, чтобы серва в покое не трещала, и рука не задевала стол. При коррекции следует контролировать чтоб движение не выходило за пределы максимальных положений руки, иначе это приведет к поломке сервы. Полученные значения записать в соответствующие позиции в настройках пробы.
Затем следует откалибровать variable_dock_x и variable_dock_y. Для этого следует припарковать оси, выставить руку в верхнее положение, затем перемещая голову через вебинтерфейс, найти такие координаты ХY, чтобы датчик свободно и до конца заходил в док ничего не задевая. Полученные координаты записать в соответствующие позиции в настройках пробы.
После этого можно проверить успешность калибровки, поочередно вводя команды _PROBE_ACTIVATE, _PROBE_DEACTIVATE. Вначале можно установить низкую скорость перемещений с помощью параметра move_speed в настройках пробы, после чего в случае успеха вернуть исходную. Если датчик где-то задевает док, и команды выполняются нестабильно, скорректировать координаты ХY.
В конце следует откалибровать Z offset. Как это делать, ты сам должен знать. Единственное, в настройках вебинтерфейса нужно настроить параметр, куда сохранять Z offset, по умолчанию auto, нужно выбрать probe. Если адаптируешь конфиг под сток систему, то имей ввиду, что могут возникнуть проблемы с сохранением Z оффсета.
Автор: Дмитрий Ковригин
Тг: @Ingen1ger