¶ Установка Cartographer3D на QIDI Plus 4
ДИСКЛЕЙМЕР! Данная модификация не является рекомендацией или призывом к действию, а инструкция только для тех, кому очень хочется использовать датчик карты стола типа Cartographer3D.
Все изменения вы делаете на свой страх и риск и под личную ответственность!!!
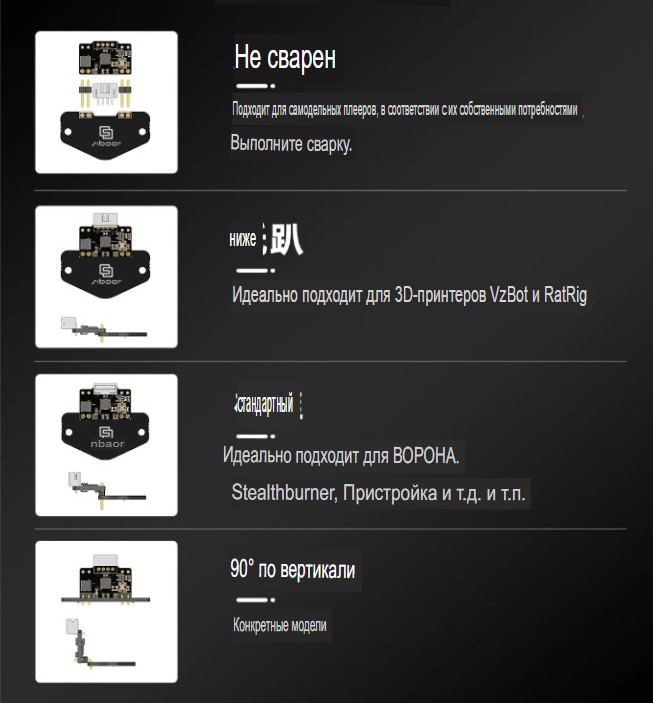
Прежде всего, вам понадобится зонд Cartographer3D. Версия USB. Если умеете паять, то можно взять не спаянную версию и собрать любую удобную конфигурацию. Если не умеете паять, то стоит взять версию 90 градусов.
Я использовал модель крепления:
https://www.printables.com/model/1170120-beacon3d-mount-for-qidi-plus4 С ней заводская крышка не подходит
Есть и другие модели, выбирать вам.
Главное в модели крепления вам следует знать смещение центра катушки по осям X и Y относительно центра сопла. Это понадобится позже.
Необходимо убедиться, что катушка находится на расстоянии 2,6–3,0 мм от кончика сопла.
Вам также необходимо протянуть USB-кабель от материнской платы к голове, для этого придется снять заднюю крышку принтера и проложить кабель соответствующим образом.
Комплектный кабель Cartographer3D замечательно помещается в заводской кабель-канал рядом со штатным проводом головы.

В идеале вы должны использовать один из портов USB 2.0, который является либо средним, либо нижним портом на материнской плате. Верхний порт, в который вставлен Wifi-адаптер, является USB 3.0 (порт синего цвета) и у некоторых пользователей происходит отвал Carto в этом порту.
¶ 1. Обновление Python
Cartographer нужен плагин для работы Klipper, этот плагин поддерживается только на Python 3.9 или выше. Qidi Plus 4 поставляется с Python 3.7 по умолчанию, поэтому нам нужно обновится до Python 3.12 и перезагрузить виртуальную среду Klipper.
Далее все действия выполняем через SSH. Что бы зайти в командной строке вводим:
ssh mks@«IP вашего принтера» без скобок
пароль makerbase (при вводе пароля буквы не отобразятся, это нормально)
Сначала загрузите и распакуйте предварительно скомпилированный Python 3.12.3 введя:
sudo service klipper stop
cd ~
wget https://github.com/stew675/ShakeTune_For_Qidi/releases/download/v1.0.0/python-3-12-3.tgz
tar xvzf python-3-12-3.tgz
rm python-3-12-3.tgz
Теперь Python 3.12.3 находится в домашнем каталоге.
¶ 2. Мы удалим виртуальную среду Klipper и создадим ее заново.
Не волнуйтесь, это не затронет никакие ваши пользовательские данные, но после этого вам нужно будет переустановить все плагины klipper.
sudo rm -rf klippy-env
~/python-3.12.3/bin/python3.12 -m venv klippy-env
cd ~/klippy-env
sed -i 's/greenlet==2.0.2/greenlet==3.0.3/' ../klipper/scripts/klippy-requirements.txt # Need to upgrade this package for 3.12.
bin/pip install -r ../klipper/scripts/klippy-requirements.txt
¶ 3. Установка Cartographer для Klipper
Теперь Klipper установлен снова с использует Python 3.12.
Теперь мы можем установить плагин Cartographer.
cd ~
git clone https://github.com/Cartographer3D/cartographer-klipper.git
./cartographer-klipper/install.sh
Плагин установлен. И мы можем снова запустить Klipper.
sudo service klipper start
¶ 4. Патч Клиппера
Версия Klipper от Qidi представляет собой модифицированную версию probe.py и не будет работать с Cartographer, нам нужно установить патч, чтобы он заработал.
Останавливаем клиппер:
sudo service klipper stop
Запускаем команду, которая загрузит исправленную копию probe.py.
wget -O /home/mks/klipper/klippy/extras/probe.py https://raw.githubusercontent.com/qidi-community/Plus4-Wiki/refs/heads/main/content/bed-scanning-probes/Beacon3D/RevH-Normal/probe.py
После этого запустите klipper:
sudo service klipper start
или выключите и включите принтер.
Сейчас самое время переустановить все плагины Klipper, которые вы использовали. Если вы хотите снова установить Shake&Tune, используйте основную версию, так как Python теперь имеет более новую версию.
¶ 5. Конфигурации Klipper
При перезапуске Klipper, вероятно, произошел сбой с ошибками о том, что что-то не найдено.

Не волнуйтесь, нам просто нужно обновить файлы конфигурации.
¶ 5.1 Изменения в printer.cfg
Нам необходимо внести следующие изменения в [Z_stepper]:
[stepper_z]
step_pin:U_1:PB1
dir_pin:U_1:PB6
enable_pin:!U_1:PB0
microsteps: 16
rotation_distance: 4
full_steps_per_rotation: 200
endstop_pin:probe:z_virtual_endstop # U_1:PC3 for Z-max
endstop_pin_reverse:tmc2209_stepper_z:virtual_endstop
#position_endstop:1
position_endstop_reverse:285
position_max:285
position_min: -4
homing_speed: 10
homing_speed_reverse: 10
second_homing_speed: 5
homing_retract_dist: 0
homing_positive_dir:false
homing_positive_dir_reverse:true
#step_pulse_duration:0.0000001
Закомментируйте (или удалите) все строки в следующих разделах, они будут добавлены позже:
#[z_tilt]
#z_positions:
# -17.5,138.5
# 335.7,138.5
#
#points:
# 0,138.5
#
#speed: 150
#horizontal_move_z: 5
#retries: 2
#retry_tolerance: 0.05
#[smart_effector]
#pin:U_1:PC1
#recovery_time:0
#x_offset: 25
#y_offset: 1.3
#z_offset: 0.000001
#speed:5
#lift_speed:5
#probe_accel:50
#samples: 2
#samples_result: submaxmin
#sample_retract_dist: 5
#samples_tolerance: 0.05
#samples_tolerance_retries:5
#[qdprobe]
#pin:!PA10
#z_offset:0.000001
#[bed_mesh]
#speed:150
#horizontal_move_z:5
#mesh_min:25,10
#mesh_max:295,295
#probe_count:9,9
#algorithm:bicubic
#bicubic_tension:0.4
#mesh_pps: 2,2
¶ 5.2 Изменения в gcode_macro.cfg
Нам необходимо изменить действия принтера в начале печати, чтобы вместо стандартных датчиков Qidi использовать датчики Carto.
Найдите и замените [gcode_macro PRINT_START]на это:
[gcode_macro PRINT_START]
gcode:
AUTOTUNE_SHAPERS
{% set bedtemp = params.BED|int %}
{% set hotendtemp = params.HOTEND|int %}
{% set chambertemp = params.CHAMBER|default(0)|int %}
SET_GCODE_OFFSET Z=0 # Zero out z-offset
M104 S0
M106 P2 S0
M106 P3 S0
M106 S255
G28
M141 S{chambertemp}
M140 S{bedtemp}
M106 S0
CLEAR_NOZZLE HOTEND={hotendtemp}
M191 S{chambertemp}
M190 S{bedtemp}
M104 S140
G29
G0 Z50 F600
G0 X5 Y5 F6000
{% if chambertemp == 0 %}
M106 P3 S255
{% endif %}
M109 S{hotendtemp}
M141 S{chambertemp}
M204 S10000
SET_PRINT_STATS_INFO CURRENT_LAYER=1
ENABLE_ALL_SENSOR
save_last_file
Найдите и замените [homing_override]на это:
[homing_override]
axes:xyz
gcode:
{% set HOME_CUR = 1 %}
{% set driver_config = printer.configfile.settings['tmc2240 stepper_x'] %}
{% set RUN_CUR = driver_config.run_current %}
{% set HOLD_CUR = driver_config.hold_current %}
m204 S10000
M220 S100
{% if params.X is defined %}
SET_KINEMATIC_POSITION Z=1.9 # Set Z position
G1 Z4 F600 # Lower Z by 4 to prevent dragging the nozzle
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR * 0.7}
G28 X
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR}
BEEP I=1 DUR=100
G1 X10 F1200
{% endif %}
{% if params.Y is defined %}
SET_KINEMATIC_POSITION Z=1.9 # Set Z position
G1 Z4 F600 # Lower Z by 4 to prevent dragging the nozzle
SET_TMC_CURRENT STEPPER=stepper_y CURRENT={HOME_CUR * 0.9}
G28 Y
SET_TMC_CURRENT STEPPER=stepper_y CURRENT={HOME_CUR}
BEEP I=1 DUR=100
G1 Y10 F1200
{% endif %}
{% if params.Z is defined %}
G28 x
G28 Y
G28 X
G1 X150 Y150 F7800
SET_KINEMATIC_POSITION Z={printer.toolhead.axis_maximum.z-30}
probe
SET_KINEMATIC_POSITION Z=-0.1
G1 Z30 F480
{% endif %}
{% if params.X is undefined %}
{% if params.Y is undefined %}
{% if params.Z is undefined %}
SET_KINEMATIC_POSITION X=0
SET_KINEMATIC_POSITION Y=0
SET_KINEMATIC_POSITION Z={printer.toolhead.axis_maximum.z-30}
G91
G1 Z7 F600
G1 X5 F2400
G1 Y5 F2400
G4 P2000
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR * 0.8}
G28 X
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR}
BEEP I=1 DUR=100
G1 X45 F1200
SET_TMC_CURRENT STEPPER=stepper_y CURRENT={HOME_CUR * 0.9}
G28 Y
SET_TMC_CURRENT STEPPER=stepper_y CURRENT={HOME_CUR}
BEEP I=1 DUR=100
G1 Y10 F1200
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR * 0.8}
G28 X
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={HOME_CUR}
BEEP I=1 DUR=100
G1 X10 F1200
SET_KINEMATIC_POSITION Z={printer.toolhead.axis_maximum.z-10}
G90
G1 X150 Y150 F7800
G91
G28 Z
G1 Z30 F600
{% endif %}
{% endif %}
{% endif %}
SET_TMC_CURRENT STEPPER=stepper_x CURRENT={RUN_CUR}
SET_TMC_CURRENT STEPPER=stepper_y CURRENT={RUN_CUR}
M204 S10000
G90
Найдите и замените [gcode_macro G29]на это:
[gcode_macro G29]
variable_k:1
gcode:
M141 S0
BED_MESH_CLEAR
SET_GCODE_OFFSET Z=0
{% if "xy" not in printer.toolhead.homed_axes %}
G28 Y # Home Y axis
G0 Y20 F1200 # Move Y axis away from Y end-stop
G28 X # Home X axis
{% endif %}
M109 S145 # Set nozzle to 145 so any remaining filament stuck to nozzle is softened
G28 Z # Home Z
CARTOGRAPHER_CALIBRATE SPEED=2 # Re-Calibrate incase build plate changes
Z_TILT_ADJUST # Ensure bed is level
G28 Z # Re-home Z again now that the bed is level
M109 S0 # Turn off hotend
{% if k|int==1 %}
BED_MESH_CALIBRATE RUNS=2 PROFILE=kamp
BED_MESH_PROFILE LOAD=kamp
SAVE_VARIABLE VARIABLE=profile_name VALUE='"kamp"'
{% else %}
BED_MESH_CALIBRATE RUNS=2 PROFILE=default
BED_MESH_PROFILE LOAD=default
SAVE_VARIABLE VARIABLE=profile_name VALUE='"default"'
{% endif %}
CARTOGRAPHER_TOUCH SPEED=2 FUZZY=10
Наконец, удалите или закомментируйте следующие строки, чтобы предотвратить сохранение старой переменной Z_offset.
#PRINT_END
#[gcode_macro PRINT_END]
#gcode:
#{% if printer.gcode_move.homing_origin.z < 0.5 %}
#SAVE_VARIABLE VARIABLE=z_offset VALUE={printer.gcode_move.homing_origin.z}
#{% endif %}
#[gcode_macro CANCEL_PRINT]
#save_zoffset
¶ 5.3 Изменения в saved_variables.cfg
Внутри saved_variables.cfg нам нужно установить z_offset = 0.0, так как этим теперь занимается Cartographer.
¶ 6. Создайте новый файл в папке конфигурации с именем carto.cfg .
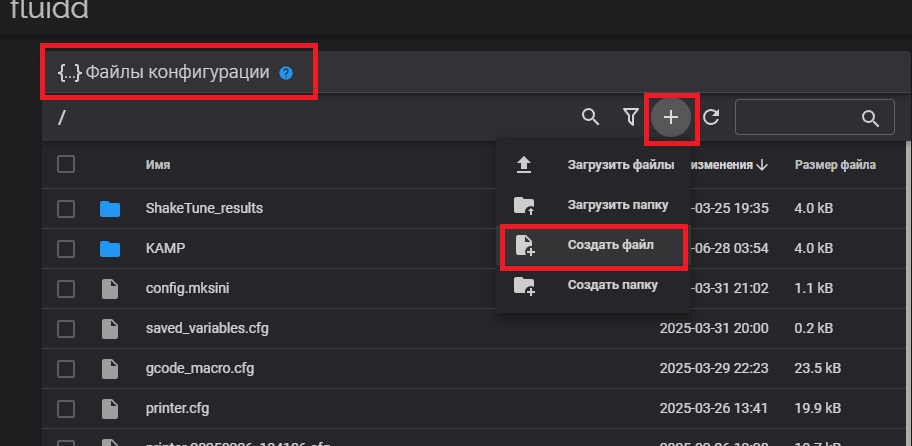
Скопируйте в новый файл конфигурацию. Сохраните и закройте. Данные в конфигурации (кроме серийника Cartographer) подходят если вы используете крепление из начала статьи
[mcu scanner]
serial: /dev/serial/by-id/usb-С_614e_ххххххххххххх
# adjust to suit your scanner, if using usb change to serial
[scanner]
mcu: scanner
# Offsets are measured from the centre of your coil, to the tip of your nozzle
# on a level axis. It is vital that this is accurate.
x_offset: 0 # Adjust this value based on your mount
# adjust for your cartographers offset from nozzle to middle of coil
y_offset: -18.8 # Adjust this value based on your mount
# adjust for your cartographers offset from nozzle to middle of coil
backlash_comp: 0.00499
# Backlash compensation distance for removing Z backlash before measuring
# the sensor response.
sensor: cartographer
# this must be set as cartographer unless using IDM etc.
sensor_alt: carto
# alternate name to call commands. CARTO_TOUCH etc
mesh_runs: 2
# Number of passes to make during mesh scan.
[temperature_sensor Cartographer_MCU]
sensor_type: temperature_mcu
sensor_mcu: scanner
min_temp: 0
max_temp: 105
#These values work for Spooknik's side mount
[z_tilt]
z_positions:
-17.5,138.5
335.7,138.5
points:
50, 170.8 # Based on Stew's mount, adjust accordingly
255, 170.8 # Based on Stew's mount, adjust accordingly
speed: 150
horizontal_move_z: 5
retries: 2
retry_tolerance: 0.05
Откройте printer.cfgи вверху под последним include напишите [include carto.cfg]. Сохраните и перезапустите.
В этом файле мы храним все изменения в printer.cfg, которые нужны Carto для работы. Вам нужно изменить несколько значений в этом файле, чтобы ваш carto работал для вашей настройки.
¶ В carto.cfg нужно прописать серийный номер вашего Cartographer
serial: /dev/serial/by-id/[ВАШ СЕРИЙНИК]
Найти серийник можно запустив в SSH.
ls /dev/serial/by-id/*
Должно получиться что-то вроде:
/dev/serial/by-id/usb-Cartographer_614e_XXXXXXXXXXXXXXXXXXXXXXXXXXX
Скопируйте все что идет после by-id/ и вставьте в carto.cfg в разделе [mcu scanner]
¶ X Y Offset
Эти данные должен предоставить автор используемого вами крепления. Расстояние по осям X и Y от центра катушки до центра сопла.
x_offset: 0 # Based on Stew's mount, adjust accordingly
y_offset: -18.8 # Based on Stew's mount, adjust accordingly
¶ [z_tilt]
В зависимости от смещения X и Y вашего крепления относительно сопла, вам необходимо обновить точки измерения z, чтобы они измеряли над ходовыми винтами.
Обычно вам необходимо применить смещение Z вашего крепления зонда к точкам измерения Z.
Вы также можете вручную переместить головку инструмента в Fluidd и записать координаты X и Y. Для получения дополнительной информации см. документы klipper
https://www.klipper3d.org/Config_Reference.html?h=z_tilt#z_tilt
Приведенные ниже значения верны, если вы используете крепление из начала статьи, и приведены просто в качестве примера.
points:
50, 170.8 # Based on Stew's mount, adjust accordingly
255, 170.8 # Based on Stew's mount, adjust accordingly
¶ [bed_mesh]
В printer.cfg добавим новую конфигурацию сетки кровати
[bed_mesh]
zero_reference_position: 150, 150
speed: 250
horizontal_move_z: 5
mesh_min: 22,30 # Based on Stew's mount, adjust accordingly
mesh_max: 280,280 # Based on Stew's mount, adjust accordingly
probe_count: 25, 25
algorithm: bicubic
Подобно z_tilt вам нужно настроить mesh_min и mesh_max, чтобы они соответствовали смещению вашего зонда. Вам нужно изменить смещение X и Y в соответствии со смещением вашего крепления, чтобы зонд всегда сканировал над кроватью
Приведенные ниже значения верны, если вы используете крепление из начала статьи, и приведены просто в качестве примера.
mesh_min: 22,22 # Based on Stew's mount, adjust accordingly
mesh_max: 283,283 # Based on Stew's mount, adjust accordingly
¶ Дополнительные макросы Выравнивания стола
Благодаря датчику Cartographer, который теперь обеспечивает точные измерения Z-Offset его можно использовать для значительного упрощения задачи выравнивания стола с помощью 4 ручек под печатной платформой.
Добавьте следующие макросы в конец вашего файла gcode_macro.cfg:
[gcode_macro SFL]
description: Get zoffset at front-left bed adjustment screw position
gcode:
G1 X{25 - printer.configfile.settings.scanner.x_offset} Y{21 - printer.configfile.settings.scanner.y_offset} F6000
PROBE
[gcode_macro SFR]
description: Get zoffset at front-right bed adjustment screw position
gcode:
G1 X{285 - printer.configfile.settings.scanner.x_offset} Y{21 - printer.configfile.settings.scanner.y_offset} F6000
PROBE
[gcode_macro SBL]
description: Get zoffset at back-left bed adjustment screw position
gcode:
G1 X{25 - printer.configfile.settings.scanner.x_offset} Y{281 - printer.configfile.settings.scanner.y_offset} F6000
PROBE
[gcode_macro SBR]
description: Get zoffset at back-right bed adjustment screw position
gcode:
G1 X{285 - printer.configfile.settings.scanner.x_offset} Y{281 - printer.configfile.settings.scanner.y_offset} F6000
PROBE
Каждый из макросов выше будет располагать датчик над ручками, чтобы вы могли быстро отрегулировать и выполнить повторное измерение.
Чтобы использовать эти макросы,сначала очистите сетку стола, припаркуйте оси и повторно откалибруйте датчик, вызвав следующие макросы:
M84
BED_MESH_CLEAR
SET_GCODE_OFFSET Z=0
G28
Z_TILT_ADJUST
G28
затем вызовите макросы, перечисленные выше, и посмотрите на последнюю строку (например, // Result is z=1.948191 ). Это информирует вас о том, насколько далеко находится печатная платформа от зонда. Вы можете отрегулировать ручку под платформой и снова вызвать тот же макрос, чтобы получить новое значение. Это можно повторить для каждой из 4 точек стола, пока все не будут равны в пределах ~0,02 мм. Будет сложно получить большую точность, чем эта. По умолчанию зонд Cartographer устанавливает голову на высоту 2,00 мм от стола после вызова G28, поэтому мы стремимся, чтобы все 4 положения винтов были большее z=1.98 и меньшее, чем z=2.02
Выравниванием стола стоит заняться после калибровки Cartographer.
Сохраняем все изменения.
¶ 7.1. Калибровка Cartographer.
(Далее все команды вводятся в консоли Fluidd)
Если вы хотите использовать Cartographer для автоматического определения Z-Offset, вам необходимо будет следовать всем дополнительным инструкциям TOUCH .
Сначала убедитесь, что вы находитесь в режиме TOUCH.
В консоли Fluidd введите:
PROBE_SWITCH MODE=touch
Далее обязательно сохраните, введя:
SAVE_CONFIG
Припаркуйте оси X и Y введя в консоли:
G28 X Y
Передвиньте сопло в центр стола введя:
G0 X150 Y150
¶ 7.2. Запустите процесс калибровки
В консоли Fluidd введите:
CARTOGRAPHER_CALIBRATE METHOD=manual
Вы можете использовать веб-интерфейс для регулировки высоты сопла от кровати. Используйте лист бумаги или щуп для измерения Z-Offset. После завершения удалите бумагу/щуп и примите положение введя:
ACCEPT
Сохраните результаты в файле конфигурации введя.
SAVE_CONFIG
Припаркуйте оси введя:
G28
Теперь можно проверить точность катушки сканера введя:
PROBE_ACCURACY
Сопло не будет КАСАТЬСЯ стола. Будет использоваться сканер для измерения точности зондовой катушки.
Вы также можете измерить люфт оси Z введя:
CARTOGRAPHER_ESTIMATE_BACKLASH
Чтобы использовать оценку люфта, которая получилась. Возьмите результат, начинающийся начиная с
Median distance moving up
В этой строке будет измерение под названием "delta". Запишите значение в файл carto.cfg. Найдите раздел конфигурации, обозначенный:
backlash_comp: 0.00499
Теперь выполняем выравнивание стола макросами из инструкции выше: SFL,SFR,SBL,SBR.
После выравнивания стола винтами вы можем запустить калибровку сетки стола введя:
BED_MESH_CALIBRATE
¶ 7.3. Настройка касания сопла
Выполнить возврат в исходное положение введя:
G28
Далее необходимо измерить наклон оси Z введя:
Z_TILT_ADJUST
Как только измерение будет сделано, сделайте еще одну парковку осей:
G28
Теперь можем запустить пороговое сканирование. Cartographer определит, какое усилие требуется чтобы постоянно касаться стола.
Перед выполнением порогового сканирования убедитесь, что выполняются следующие условия.
- Ваше сопло чистое
- Ваша постель чистая, в месте, которое вы проверяете, нет никаких вмятин или пузырей.
- Ваш зонд находится на расстоянии 2,6–3 мм от сопла.
- Ваша кинематика жесткая.
Введите:
CARTOGRAPHER_THRESHOLD_SCAN
Это запустит процесс касания соплом стола, переместит голову в исходное положение, а затем опустит ее, пока она не коснется стола. Ничего страшного, если сначала сопло вообще не коснется стола, это совершенно нормально. В конце концов сопло начнет касаться.
Однако если процесс закончился и сопло не коснулось стола, начните процесс заново или настройте параметры следующим образом
Пример:
CARTOGRAPHER_THRESHOLD_SCAN MIN=500
где MIN = найденное пороговое значение ложного срабатывания.
Как только найдется оптимальный порог и вы увидите, как сопло касается стола, процесс остановится.
Вы можете остановиться на этом, но для большинства тонкая настройка может быть полезной.
Повторно запустите команду, установив значение MIN немного выше (+250) предыдущего оптимального результата и дайте ей снова запуститься.
Теперь выполните калибровку касания с новым порогом введя:
CARTOGRAPHER_CALIBRATE
Если все выполнено правильно тест касания должен пройти успешно и теперь вы можете завершить его сохранив эти переменные в своей конфигурации введя:
SAVE_CONFIG
Калибровка и настройка CARTOGRAPHER закончена.
Так как мы добавили на голову вес в виде нового крепления и датчика, рекомендуется заново произвести калибровку input shaper
Статью перевел специально для WIKI: t.me/WoolfRS